Printed Paper Actuator
Printed Paper Actuator: A Low-cost Reversible Actuation and Sensing Method for Shape-Changing Interfaces
Guanyun Wang*, Tingyu Cheng*, Youngwook Do, Humphrey Yang, Ye Tao, Jianzhe Gu, Byoungkwon An, Lining Yao (*contributed equally)
Publication: Printed Paper Actuator: A Low-cost Reversible Actuation and Sensing Method for Shape Changing Interfaces (CHI 2018) PDF
Webpage: Paper Actuator- Morphing Matter Lab
Role: Computational toolmaking, documentation
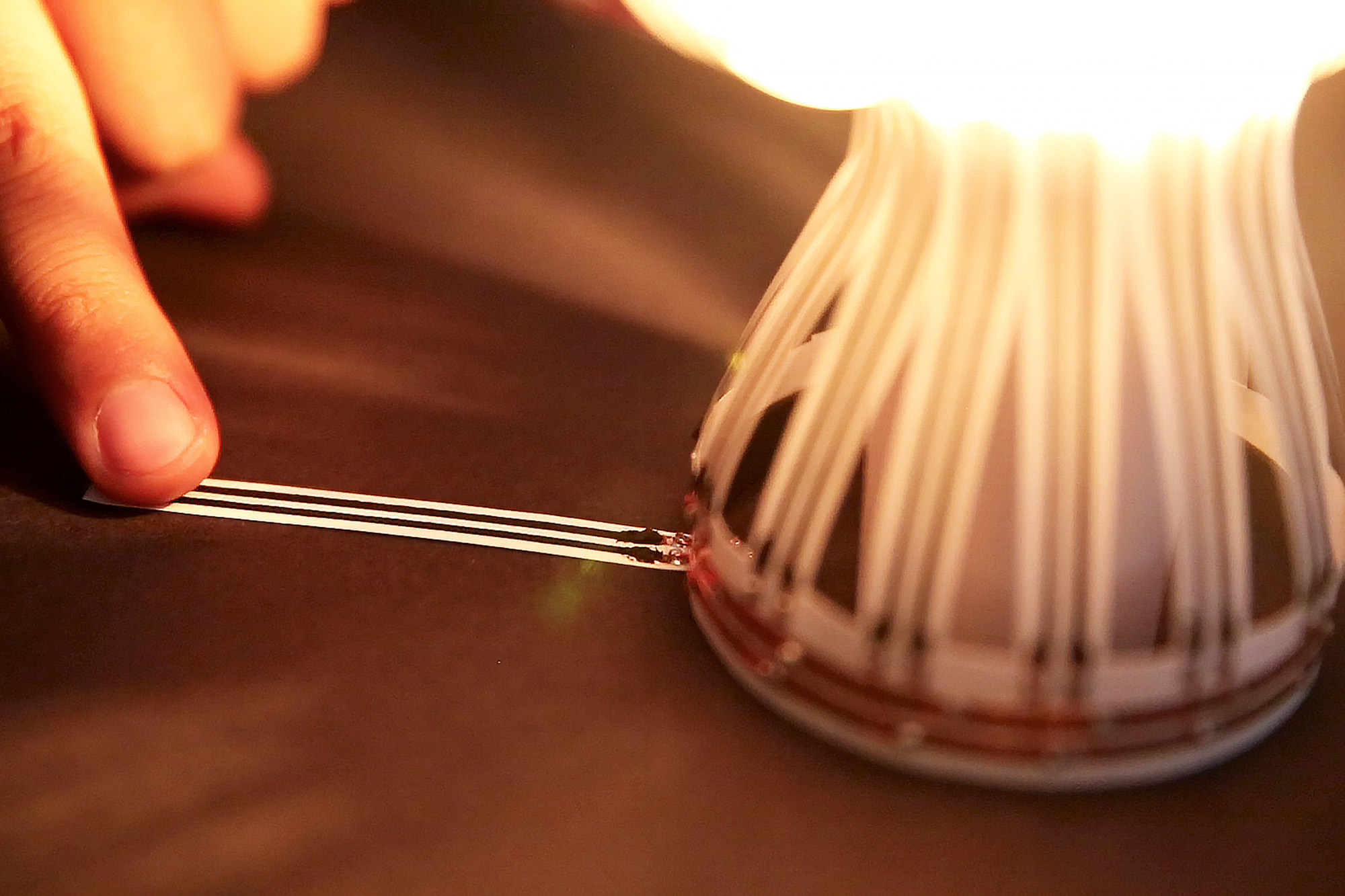
We present a printed paper actuator as a low cost, reversible and electrical actuation and sensing method. This is a novel but easily accessible enabling technology that expands upon the library of actuation-sensing materials in HCI. By integrating three physical phenomena, including the bilayer bending actuation, the shape memory effect of the thermoplastic and the current-driven joule heating via conductive printing filament, we developed the actuator by simply printing a single layer conductive Polylactide (PLA) on a piece of copy paper via a desktop fused deposition modeling (FDM) 3D printer. This paper describes the fabrication process, the material mechanism, and the transformation primitives, followed by the electronic sensing and control methods. A software tool that assists the design, simulation and printing toolpath generation is introduced. Finally, we explored applications under four contexts: robotics, interactive art, entertainment and home environment.
Video Credit: Morphing Matter Lab



We developed a parametric design tool to explore the design space of Printed Paper Actuator. The tool contains a library of primitive designs with adjustable parameters. Users can also input an arbitrary pattern and specify the actuation angle of each panel. The tool will then provide a visual simulation of the transformation and produce corresponding fabrication files.



Awards
Honorary Mention, STARTS PRIZE, Ars Electronica, 2018
News
WIRED:Prepare to Be Hypnotized By These Delicate Paper Robots
Seeker:Paper That Bends And Folds Itself
3DERS:Delicate robots made of 3D printed ink and paper can fold or flatten on command